I. INTRODUCERE
Cercetarile
efectuate in cadrul acestei faze au urmarit proiectarea si experimentarea a doua tipuri de microstructuri:
senzorii optici
de pozitie sau de proximitate cu aplicatii in micro-robotica care au ca
principal element de detectie optica un fotodetector miniatura. Un tip de fotodetector util pentru sesizarea pozitiei unui
obiect ca urmare a interactiei cu o radiatie optica este fotodetectorul
multielement. Elementele
active ale fotodetectorului sunt fotodiode PIN sau fotodiode de tip MSM.
Structura de fotodetector de tip MSM a fost abordata la faza anterioara. Pentru
aceasta faza s-au proiectat doua tipuri de fotodetectoare multielement.
Unul sub forma de doua matrici liniare
cu 4 elemente fiecare si al doilea sub forma de matrice patrata cu 3x3 elemente.
Pentru realizarea acestor tipuri de structuri s-au proiectat si realizat
mastile si s-a elaborat si experimenatt
fluxul tehnologic.
o noua configuratie
de microgriper polimeric, cu actuare
electro- termica. Acest principiu de actionare este mult mai eficient comparat cu altele si are un timp de
raspuns redus. Structura straturilor ce alcatuiesc microgriperul urmareste reducerea deplasarilor mecanice nedorite, pe vericala, pentru cele doua brate. Principiul de operare
consta in deformarea mecanica si
apropierea celor doua brate ale microgriperului, care la randul lor sunt
compuse din doua ramuri: dintr-o ramura asa numita 'calda' si una numita
'rece', de fapt din doua rezistente metalice cu configuratii si dimensiuni
diferite. Curgerea
curentului prin brate va produce incalzirea mai puternica a uneia dintre ramuri, fapt ce va induce o
deformare mecanica, provocand apropierea celor doua brate ale microgriperului.
Microgriperul proiectat vizeaza aplicatii biomedicale si poate opera atat in
aer cat si in mediul lichid. Combinatia straturilor polimerice si conductive,
precum si geometria microstructurii au
avut in vedere obtinerea unei actuari electro-termice eficiente pentru o
temperatura relativ redusa , care sa nu
produca defectarea (alterarea)
celulelor biologice.
Manipularea celulara
individuala a castigat teren in multe aplicatii incluzand sortarea celulelor
stem, distribuire moleculara si de gene, diagnostic celular si probe bazate pe
o singura celula. In mod direct, manipularea fizica a celulelor ofera o
selectie mult mai precisa si o intelegere a proprietatilor celulelor fata de datele obtinute ca
si medie pentru o populatie de celule.
Manipularea celulelor necesita nu
numai un manipulator precis si controlabil dar de
asemenea un efector final potrivit care poate fi setat pentru a realiza anumite
functii fara a dauna celulelor. Meritul major pentru manipulari (cum ar fi
gripparea si mutarea celulelor izolate) este
biocompatibilitatea efectorului final (end effector), precizia pozitionarii
efectorului final si manipularea blanda.
Sistemul de nanomanipulare L200 Zyvex este o platforma multilaterala de maniupulare compusa din
nanopozitioneri controlabili care furnizeaza o rezolutie de sub un micron
pentru un control precis si de acuratete. Combinat cu efectori finali se poate
folosi L200 pentru a manipula probele biologice - de la biopolimeri la celula.
Microgripperii polimerici realizati din SU-8 pot fi montati ca si efectori pe un L200 pentru a
realiza manipularea celulelor in suspensie.
Manipularea celulara
Manipularea
controlata a celulelor intr-un mediu apos este de un interes atractiv pentru
aplicatiile biomedicale.Tehnici variate de manipulari au fost dezvoltate pentru
a ajunge la manipularea controlata a celulelor.Aceste tehnici pot fi
clasificate in general in tehnici de contact si non-contact.
Tehnicile
de non-contact angajeaza in general principii optice cum ar fi de exemplu
pensetele opto-electronice si pensetele laser. Un dezavantaj major al acestor
pensete este potentialul efect daunator pe care il pot cauza sistemelor
biologice, rezultand in scaderea timpului de viata a unui sistem - limitand
astfel timpul ce poate fi petrecut pentru studierea unui sistem. Alte tehnici
non-contact utilizeaza campuri electrice si magnetice. Aceste metode, printre
care traparea singulara sau multipla a celulelor, sunt specifice pentru celule,
si necesita aranjamente complexe electrice sau magnetice.
Cea
mai folosita tehnica de contact necesita tehnologii vacuum pentru a tine
celulele. Aceasta tehnica, capabila de a tine celulele pentru micro-injectie,
nu da suficient control pentru sortarea si izolarea celulelor .O alta tehnica
de contact pentru manipularea specimenelor biologice implica folosirea
dispozitivelor micro-fabricate cum ar fi microgripperele si microprobele.
Tehnologii folosite in sistemele microelectromecanice (MEMS) permit fabricarea
dispozitivelor micoscalice care furnizeaza o gama larga de optiuni, referitor
la design, performanta si compatibilitate materiala.
Controlul
direct al miscarii microgripperelor permite manipularea controlabila a
celulelor si capacitate multi-functionala, incluzand sortarea celulara,
izolarea si pozitionarea celulara. Dezvoltari recente in in tehnologiile de
fabricare pentru micro-dispozitivele polimerice au fost un factor semnificativ
in cresterea activitatilor de cercetare la microscala. .Microgripperele pot fi
usor si sigur montate pe un L200 ca end-efectiori robusti pentru a performa
manipularea biologica.
Determinarea pH intracelular
Uneltele
de manipulare biologica necesita "end-efectori" care sa fie biocompatibili, sa
opereze la temperatura fiziologica, si sa aibe o forta de manipulare gentila.
In plus, asemenea unelte trebuie de asemenea sa fie capabile de a fi integrate
sistemelor de manipulare pentru a atinge o miscare controlabila, precisa.
Microgripperele facute din metal sau silicon si acelea actionate prin mecanisme
electrostatice sau piezoelectrice, nu intrunesc unul sau mai multe dintre
criteriile mentionate.
Microgripperele
polimerice activate electrotermic au
fost dezvoltate specific pentru a servi ca si end-efectori pentru manipularea
specimenelor biologice. SU-8, a fost folosit ca strat multistructural, in care Ni este folosit ca stratul de
incalzire pentru actuatorii electrotermici. Proprietatile SU-8 ( cum ar fi
rigiditate structurala, coeficient ridicat de dilatare termica (aprox.52x10-6/sC)
au fost utilizate pentru a obtine grippere cu un consum scazut de putere, si in
consecinta, temperatura scazuta de operare. Microgripperul consta dintr-un brat
mobil asezat pe un brat fix. Grinzi lungi, inclinate, conectate in serie, se
comporta ca un actuator termal. Acest design are o mai mare rezistenta (si in
consecinta un flux mai scazut de curent), rezultand intr-o temperatura de
operare mai scazuta. Actuatorii electrotermici (facuti din Ni) sunt incalziti
prin trecerea curentului.Caldura este apoi transferata pe incarcatura stratului
SU-8 care se dilata, producand dislocarea laterala la extremitatile gripperului. Gripperele sunt sablonate
fotolitografic rezultand fabricarea cu un grad inalt de repetabilitate. Odata
sablonat, stratul de sacrificare dintre SU-8 si substratul este eliminat,
lasand in urma gripperele care sunt suspendate. In final, gripperele sunt
complet eliberate.
Gripperele pot fi folosite in medicina si
biologie, in special in transportul medicamentelor, diagnostic, inginerie
tisulara.
Proiectare arhitectura lay-out pentru senzori
optici de micropozitionare
Fotodetectoarele proiectate pentru
senzorul optic sunt frin forma de doua
matrici liniare cu 4 elemente fiecare si al doilea sub forma de matrice patrata
cu 3x3 elemente. Fiecare element este o fotodioda PIN realizata pe siliciu in
care semnalul determinat de generarea sarcinilor la jonctiune este proportional
cu lumina incidenta. Geometria celor doua tipuri de fotodetectoare a fost
aleasa tinand seama de caracteristicile semanlului care trebuie detectat.
Astfel matricea liniara urmeaza a fi integrata cu un ghid optic care trece
peste aria activa a fotodiodelor si unda evanescenta va fi cuplata in fotodioda
iar fotodetectorul de tip matrice patrata va detecta un spot de lumina a carui
pozitie este stabilita in functie de fotodioda matricii care va furniza un
semnal electric.
Caracteristicile fotodetectoarelor
sunt determinate de:
caracteristicile
elementelor de detectie deci ale fotodiodelor PIN
dimensiunile si spatiul dintre ele.
2.1. Stabilirea
parametrilor de structura
Principalele caracteristici ale fotodiodei PIN
importante pentru acest tip de aplicatie care trebuie analizate pentru
stabilirea parametrilor de structura sunt:
responsivitatea
curentul de intuneric
liniaritatea
Responsivitatea, (R), definita ca
raportul fotocurentului generat, (IL) la puterea optica a radiatiei
incidente, (F0), este data
de relatia:  unde l este lungimea de unda a radiatiei
incidente, h,c,e sunt constante cunoscute, h este eficienta cuantica data de raportul numarului de electroni
fotogenerati colectati la contacte si numarul de fotoni incidenti pe structura.
Pentru o structura de tip PIN eficienta cuantica este
data de relatia:
unde l este lungimea de unda a radiatiei
incidente, h,c,e sunt constante cunoscute, h este eficienta cuantica data de raportul numarului de electroni
fotogenerati colectati la contacte si numarul de fotoni incidenti pe structura.
Pentru o structura de tip PIN eficienta cuantica este
data de relatia:  unde r - coeficientul
de reflexie la suprafata, a -
coeficientul de absorbtie al materialului semiconductor, xj -adancimea
jonctiunii, d - grosimea stratului de absorbtie.
unde r - coeficientul
de reflexie la suprafata, a -
coeficientul de absorbtie al materialului semiconductor, xj -adancimea
jonctiunii, d - grosimea stratului de absorbtie.
Astfel
responsivitatea este determinata pe de o parte de
parametrii de material (a si r) iar pe
de alta parte de parametrii de structura cum sunt adancimea jonctiunii,
grosimea si rezistivitatea stratului de absorbtie a radiatiei.
Pentru o
responsivitate cat mai mare grosimea stratului de absorbtie trebuie sa fie comparabila cu
adancimea de patrundere a luminii. In
fig.1 se da coeficientul de absorbtie al radiatiei in siliciu. Astfel pentru
lungimea de unda de 650nm coeficientul de absorbtie, a este de 4 103 cm-1, rezultand o adancime de patrundere, 1/a de 5mm.
Pentru absorbtia completa a radiatiei se considera utila o grosime egala cu
trei parcursuri ale radiatiei, 3x1/a deci o grosime de 15mm. Pe de alta parte grosimea stratului de
absorbtie a radiatiei influenteaza timpul de raspuns al dispozitivului limitat
de timpul de tranzit al purtatorilor prin zona de drift. Este necesara optimizarea structurii pentru un raspuns cat mai mare in
conditiile unui timp de raspuns cat mai scurt.

Fig. 1. Dependenta spectrala a
coeficientului de absorbtie al radiatiei in siliciu.
Liniaritatea raspunsului cu intensitatea
semnalului incident
Pentru senzorii optici de pozitie un aspect
important este ca fotodiodele componente ale matricii fie patrata fie liniara
sa aiba aceeasi responsivitate astfel incat sa furnizeze acelasi fotocurent
pentru un anumit nivel de iluminare. Pe de alta parte raspunsul fiecarei
fotodiode trebuie sa depinda liniar cu puterea incidenta. Aceste aspecte depind
atat de calitatea plachetelor de siliciu initiale cat si de procesarea
tehnologica. De aceea la aceasta faza au fost optimizate procesele tehnologice
de realizare structuri de fotodetectoare multielement.
Curentul de intuneric
Curentul de intuneric al fotodiodelor componente ale matricii trebuie
sa fie cat mai redus( ~ 1pA) pentru ca dispozitivul sa raspunda la semnalae incidente slabe pentru care fotocurentul
are valori mici dar care trebuie sa fie mai mari decat curentul de intuneric.
Puterea echivalenta de zgomot,(NEP)
Puterea echivalenta de zgomot este cantitatea de
lumina care fiind incidenta pe dispozitiv produce un semnal a carui marime este
egala cu zgomotul intern al dispozitivului, in mare parte determinat de curentul
de intuneric. Un NEP
care este de dorit pentru dispozitiv este de < 10-11W/Hz1/2,
raportul S/N >10dB pentru intensitati de 1x10-6W/cm2.
Astfel pentru a avea un zgomot redus trebuie ca valoarea curentului de
intuneric sa fie cat mai mica. Un curent de intuneric redus inseamna un raport
S/N mare.Sunt de dorit curenti de intuneric de ordinul picoamperilor.
Timpul de raspuns al structurii la un semnal incident modulat in timp este determinat de
cel mai mare dintre constanta de timp de tip RC unde R este rezistenta de
sarcina iar C este capacitatea si timpul de tranzit al purtatorilor prin
stratul golit. Capacitatea este
determinata de aria jonctiunii si
grosimea stratului golit fiind cu atat mai redusa cu cat aria este mai mica si
grosimea stratului golit mai mare iar timpul de tranzit este ttr=d/vdr
fiind cu atat mai mic cu cat stratul d este mai mic. Pentru functionare in
regim de golire totala, pentru o grosime de 20mm si o viteza
maxima, de saturatie, a purtatorilor de 106cm/s timpul de tranzit
este de 2ns. Parametrii de structura
stabiliti pentru caracteristici optime sunt:
- plachete de siliciu epitaxiale, pP+, cu grosimea stratului epitaxial de 20mm si rezistivitate in plaja 80-90 Wcm. Acest strat se goleste complet de purtatori la o tensiune inversa de 80V
- adancimea jonctiunii N+p, xj=1,6mm, concentratia la suprafata de 1020cm-3.
- aria activa de 0,0144mm2.
Un aspect important in cazul
fotodetectoarelor multielement este influenta reciproca a elementelor alaturate
care trebuie sa fie cat mai redusa pentru ca semnalul sa fie corelat bine cu
pozitia obiectului de detectat. In cazul fotodetectorului multielement sub
forma de matrice liniara care va fi integrat cu un ghid optic distanta dintre
elementele fotodetectorului va trebui sa tina seama de faptul ca oxidul va avea
o panta si nu o treapta intre structuri necesara pentru trecerea ghidului
polimeric altfel acesta se va intrerupe. Astfel distanta intre elementele matricii bidimensionale este de 30 mm.
O sectiune transversala prin structurile
de fotodiode din matricea patrata si din matricea liniara sunt prezentate
in fig.1 in care se vede ca structurile
sunt identice dar radiatia este incidenta direct pe aria activa in fotodioda
din matricea patrata in timp ce in a doua structura radiatia este cuplata
dintr-un ghid optic integrat cu fotodioda.


Fig. 2. Sectiuni transversale prin
structurile de fotodiode PIN din senzorii optici multielment. 1-oxid; 2-strat
difuzat N+, 3-strat epitaxial de siliciu de tip P, 4- substrat de
siliciu de tip P+, 5 - contact metalic la substrat, 6- contact
metalic pe aria activa, 7-ghid optic.
2.2. Proiectare masti pentru senzorul de
micropozitionare
Pentru realizarea structurilor de fotodetectoare
multielement s-a proiectat si realizat un set de masti experimentale dat in fig. 3 si 4 care cuprinde urmatoarele
masti:
M1 - pentru deschiderea ferestrei
pentru difuzia jonctiunii N+p
M2 - pentru
deschidere ferestre de contact;
M3 - pentru corodare metalizare in vederea
delimitarii contactelor.
In fig. 5 si fig. 6 sunt date lay-out-urile pentru cele doua tipuri
de structuri. In fig. 7 sunt date imaginile mastilor
pe rubylith suprapuse.

a) b) c)
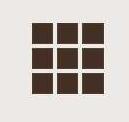
Fig. 3. Masti pentru fotodetectorul
multielement de tip matrice patrata. a) M1-deschidere ferestre pentru
difuzie; b) M2-deschidere ferestre de contact; c) M3-corodare metalizare

a) b)
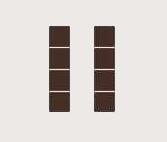
Fig. 4. Masti pentru fotodetectorele
multielement de tip matrice liniara. a) M1-deschidere ferestre pentru
difuzie; b) M3-corodare metalizare

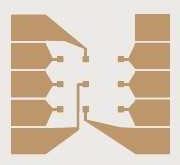
Fig. 5. Lay-out pentru senzorul cu 3x3 elemente
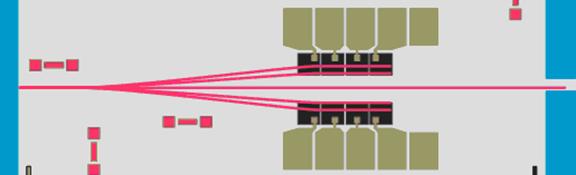
Fig. 6. Lay-out pentru doua matrici liniare de
fotodiode PIN integrate cu ghidul optic


Fig. 7. Imaginea mastilor pe rubylith suprapuse
pentru matricea patrata si matricile liniare

